Firma Q-CTRL z austrálskeho Sydney priniesla vedeckú štúdiu, v ktorej informuje o vytvorení nového druhu presnej navigácie. Nepresnosť takzvaného inerciálneho systému tu kompenzujú na základe magnetických anomálií, teda drobných odchýlok od priemerných hodnôt magnetického poľa planéty.
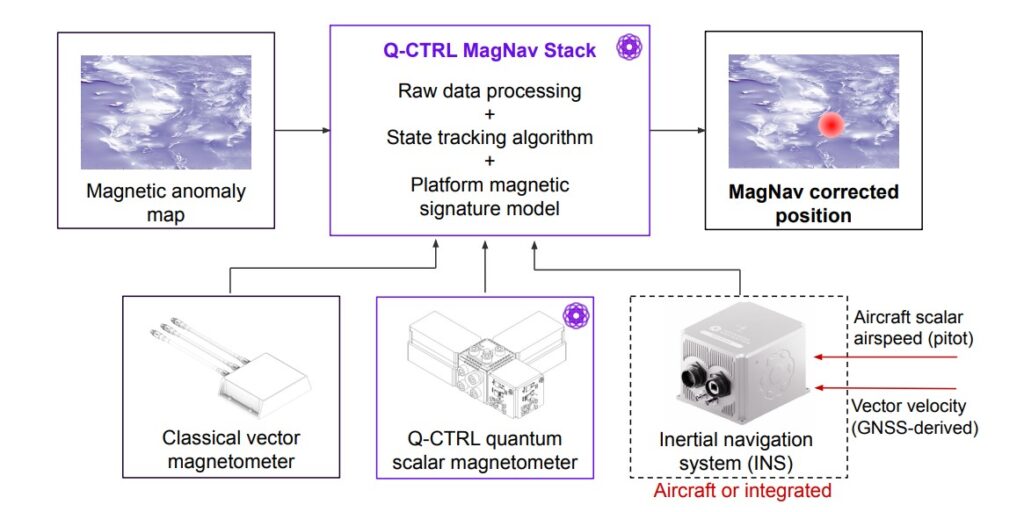
Aby navigácia takýmto spôsobom fungovala, vyžaduje sa nesmierne presné meranie magnetického poľa Zeme. Štandardný detektor takúto presnosť neposkytuje, výskumníci museli použiť kvantové meranie magnetizmu v spojení so špeciálnym algoritmom schopným odstrániť šum a porovnať namerané hodnoty s existujúcou mapou magnetických anomálií.
Prístroj experimentálne overili v pozemnej aj leteckej prevádzke, až do výšky 19-tisíc stôp, čo zodpovedá 5 791 metrom. Odchýlka dosiahla iba 22 metrov, teda 0,006 percenta celej preletenej vzdialenosti.
Iné metódy pritom bez použitia externej kompenzácie dosahujú až 46-násobnú chybovosť. Na pozemnom vozidle, s verejne dostupnými mapami magnetických anomálií, dosiahli chybu približne sedemkrát nižšiu ako čisto inerciálny navigačný systém.
Zisťovanie polohy cez satelity
V súčasnosti využívame na určovanie geografickej polohy najčastejšie družicovú navigáciu. Prvým z takýchto navigačných systémov bol americký GPS, podobný spôsob však používa aj ruský Glonass, európska navigácia Galileo alebo čínska sústava BeiDou.
Princíp funkcie je relatívne jednoduchý – satelit vysiela extrémne presný čas vytváraný takzvanými „atómovými“ hodinami. Spolu s časom sa odosiela aj poloha družice, tá obieha po presnej dráhe vo výške približne 20-tisíc kilometrov.

Pozemná stanica zachytí z rôznych satelitov rôzne časy, ktoré sa líšia dobou letu rádiového signálu, ten závisí od vzdialenosti konkrétnej družice. Vzhľadom na to, že rádiový signál sa šíri rýchlosťou svetla, dokážeme porovnaním času a dráh viacerých satelitov vypočítať polohu prijímača.
Na dosiahnutie potrebnej presnosti, ktorá je aj nižšia ako meter, treba brať do úvahy aj teóriu relativity. Tá musí zohľadniť nielen fakt, že družica sa relatívne rýchlo pohybuje voči pozorovateľovi, ale na úrovni jej dráhy je nižšie gravitačné pole, v ktorom čas beží rýchlejšie.
Zraniteľnosť satelitnej navigácie
Prvé prijímače satelitnej navigácie boli obrovské kufríky, miniaturizácia zmenšila ich rozmer do jediného čipu, ktorý sa dá umiestniť aj do mobilného telefónu. Hoci je dnes družicová navigácia všadeprítomná, používame ju v civilnom aj vojenskom nasadení, jej hlavnou nevýhodou zostáva zraniteľnosť.
Navigačné údaje sa získavajú príjmom extrémne slabých družicových signálov. Tie sa dajú veľmi jednoducho rušiť vysielaním silných rádiových vĺn na rovnakej frekvencii. Vzhľadom na to, že takzvané „verejné“ navigačné signály nie sú šifrované, útočník dokáže vytvárať aj „falošný“ signál, ktorý poskytuje nesprávnu polohu.
Každý navigačný systém má preto aj „vojenské“ kanály, kde je informácia šifrovaná, a teda odolná voči nesprávnym dátam. „Prehlušenie“ silnejším signálom však dokáže znehodnotiť aj takéto kanály.
Navigácia rádiom
Už pred príchodom družíc používali na zisťovanie polohy rádiové signály z pozemských vysielačov. Dodnes takýto spôsob používajú v letectve, umožňuje lietadlu nájsť správny smer k letisku aj presný uhol, pod ktorým sa dá pristáť.
Využívajú fakt, že takzvanou „smerovou“ anténou vieme prijímať len signály z konkrétneho smeru a porovnaním zamerania viacerých vysielačov vieme určiť našu polohu. Pokročilejšie systémy vysielajú viaceré signály a na príjem nemusia využívať smerovú anténu.

Už presné bombardovanie počas druhej svetovej vojny využívalo takéto rádionavigačné pomôcky. Neskôr postavili hlavne na vojenské účely globálny systém TACAN.
Rovnako ako pri družicových systémoch je tento navigačný spôsob citlivý na rušenie a na rozdiel od satelitov nemá globálne pokrytie, dosahuje maximálne stovky kilometrov od vysielača.
Poloha bez vonkajšej komunikácie
Takzvaná „inerciálna“ navigácia (INS) predchádza satelitnú. Existovala ešte pred používaním kozmických technológií. Využíva iba príslušné fyzikálne zákony mechaniky.
Tvorí ju sústava zotrvačníkov, takzvaných gyroskopov, doplnená meračmi zrýchlenia nazývanými akcelerometre. Gyroskopy určujú orientáciu v priestore, čo je dôležité pri možnosti pohybu vo všetkých troch rozmeroch, napríklad v lietadlách alebo kozmických lodiach.
Akcelerometer funguje na rovnakom jave, ako keď nás v aute pri zrýchlení „pritlačí do sedadla“ a pri prudkom brzdení zase „oprie dopredu“. Využíva zotrvačnosť.
Základným princípom INS je „integrácia“, teda postupné sčítavanie jednotlivých nameraných hodnôt. Integráciou zrýchlenia dostaneme rýchlosť a opätovnou integráciou rýchlosti dostaneme polohu. Tak ako keď si v aute spočítame, že hodina jazdy stokilometrovou rýchlosťou a ďalšia hodina „päťdesiatkou“ znamená, že sme celkovo prešli za dve hodiny 150 kilometrov.
Korigovať sa dá pozorovaním povrchu
Inerciálnu navigáciu používame aj dnes, hlavne tam, kde je vysoké riziko neprítomnosti družicovej navigácie. Teda primárne vo vojenskom použití, orientujú sa ňou napríklad križujúce strely.
Aj v tých zariadeniach, ktoré intenzívne využívajú zisťovanie polohy cez satelity, napríklad lode či lietadlá, existuje INS ako alternatíva pri výpadku primárneho spôsobu navigácie.

Základným problémom inerciálnej navigácie je jej narastajúca nepresnosť. Každé meranie zrýchlenia akcelerometrom či orientácie gyroskopom vnáša určitú chybu. Tieto chyby sú síce malé, postupným dvojnásobným sčítaním však extrémne narastajú. Pravidelne preto treba navigačný systém „korigovať“ porovnaním so známou polohou.
Jedným zo spôsobov "opravy" INS je sledovanie povrchu Zeme a porovnávanie čŕt terénu s mapou v pamäti. Takýto princíp, nazývaný TERCOM, využívajú napríklad križujúce strely, ktoré letia nízko pri povrchu. Sú tak ťažšie zistiteľné nepriateľskými radarmi.
Správnu cestu vedia nájsť aj hviezdy
Prostriedky, ktoré sa pohybujú vo väčších výškach, ide napríklad o lietadlá, kozmické lode ale aj strategické nukleárne strely, sa spoliehajú na nebeskú oblohu.
Vzájomná poloha hviezd je totiž prakticky stála, ich pozícia voči pozorovateľovi je však daná zemepisnou polohou aj miestnym časom. Tieto faktory závisia od rotácie Zeme.
Ostatné nebeské telesá ako Slnko, Mesiac či planéty sa síce zdanlivo presúvajú oblohou, ich pohyby sú však vypočítateľné a predpovedateľné. Vieme, že obiehajú v rámci slnečnej sústavy aj korešpondujú s pohybom Zeme okolo Slnka a Mesiaca okolo Zeme.
Takáto „nebeská navigácia“ tak môže slúžiť na určovanie polohy, stačí odmerať pozície nebeských telies a porovnať ich s vypočítanými miestami. Dnes sa to deje automaticky, oblohu snímame kamerou a namerané dáta prepočítava počítač. Dávni námorníci to robili manuálne s použitím sextantu a dopredu vypočítaných astronomických tabuliek.
Astronavigačné pomôcky však vedia korigovať aj odchýlky v INS, to intenzívne využívame okrem vojenských aplikácií aj v kozmickej technológií. Družice a kozmické lode sa totiž pohybujú aj nad navigačnými družicami, kde ich signál nie je k dispozícii.
Nový systém používa anomálie magnetického poľa
Austrálski autori priniesli úplne inovatívny prístup, kde na zistenie polohy používajú anomálie magnetických polí. Magnetické pole Zeme totiž nie je konštantné, jeho intenzita sa na rôznych miestach mení.
Je to spôsobené napríklad odlišným rozložením hornín aj magnetickým dipólom zemského jadra. Vzhľadom na to, že magnetické pole Zeme funguje ako štít na energetické častice zo Slnka, v niektorých veľkých anomáliách môže dôjsť aj k zvýšenej radiácii.
Ak magnetické anomálie zmapujeme, môžeme jeho odmeraním približne určiť miesto, na ktorom sa nachádzame. Na určenie polohy to nestačí, dá sa však pomocou neho zvýšiť presnosť inerciálneho určovania polohy, keď INS dosiahne presnosť rádovo porovnateľnú aj s GPS.
Meranie magnetického poľa pritom nevyžaruje žiadne signály na rozdiel od sledovania terénu radarom. Nutnosťou je však využívať detektor magnetického poľa na kvantových princípoch, lebo požadovaná presnosť merania malých magnetických polí musí byť relatívne vysoká.